3DSOM Pro BETA release
The 3DSOM team have been busy working on some exciting new developments that we are about to release to the world in our latest BETA (3DSOM Pro v4). The changes are the biggest overhaul of our technology for at least 3 years.
Please fill-in the form above to access the BETA software today. The BETA testing is complete. You can now download 3DSOM Pro v4 from out trial download page.
Here’s a few of the key new features.
Freedom from Stripes:
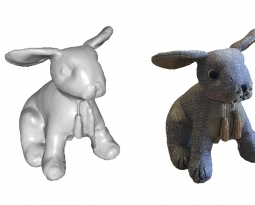
For a number of years our solution has used an active scanning approach using a digital projector to capture high quality point cloud data for creating detailed 3D models by projecting our “stripe” pattern onto the object. However we wanted all our users to be able to quickly scan objects without the hassle or cost that this can involve so we have built a new robust system for capturing high quality 3D point data using a single camera. In our approach pairs of photos are taken with a digital camera and using some clever photogrammetry processing we capture highly detailed 3D point data for creating detailed 3d models.
We have focused on capturing as much information from every photo as possible and combining the point clouds together in a robust way so that the number of shots required and processing time is kept to a minimum. The solution has been tested on a wide variety of objects including complex and less patterned surfaces that conventional stereo techniques can find difficult. For very plain or shiny objects we still recommend our projected “stripes” approach but for many situations the new technology can build very detailed models that don’t need post editing.

New targets for large objects
3DSOM Pro works by detecting our special coded radial printed target in the photos – usually placed under the object you are scanning. This is a very reliable technique that doesn’t require the object itself to have easily recognizable features. However it can be difficult to capture larger objects as you need to print a very large radial target.
To solve this problem we have come up with a set of “domino” targets that can be placed around the base of large objects. So you can print twenty A4 sheets and place these around the scene rather than requiring a massive 2 metre radial target. Other competitor solutions support coded targets but our approach is unique in that each domino is a known planar object with 6 detectable dots in a known configuration – combining this information is a lot more reliable than tracking single coded point features.
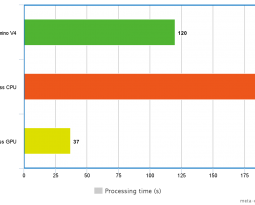
The end result is that we can reliably determine the camera positions and orientation from a relatively small set of photos and without requiring a lot of processing power. We think this approach has a lot of potential and have a patent filed.

Higher resolution models and webGL export
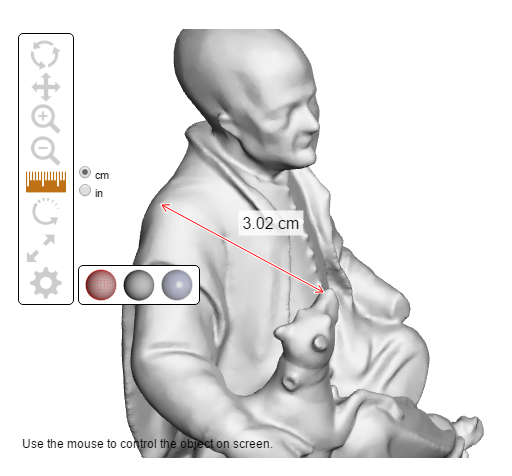
The new release also allows higher resolution meshes to be captured and processed as well as support for higher resolution texture maps. We have also revamped our webGL export so you can display captured 3D models easily on a web page including support for textured, wireframe or shaded model display. The webGL viewer now includes an interactive measurement tool.