Free-form photo scanning
3DSOM has always relied on using calibration markers (a single flat mat or set of “domino” markers) to allow fully automatic and reliable camera tracking for 3D capture. Tracking the camera position and orientation used for each shot is an essential first step in capturing a 3D model.
We recognize that many of our users are increasingly interested in a “marker-free” solution that just uses “natural” scene features to recover the camera parameters. So we have been working hard on building a state-of-the-art marker-less solution. This is working well and will be released in the next few weeks.
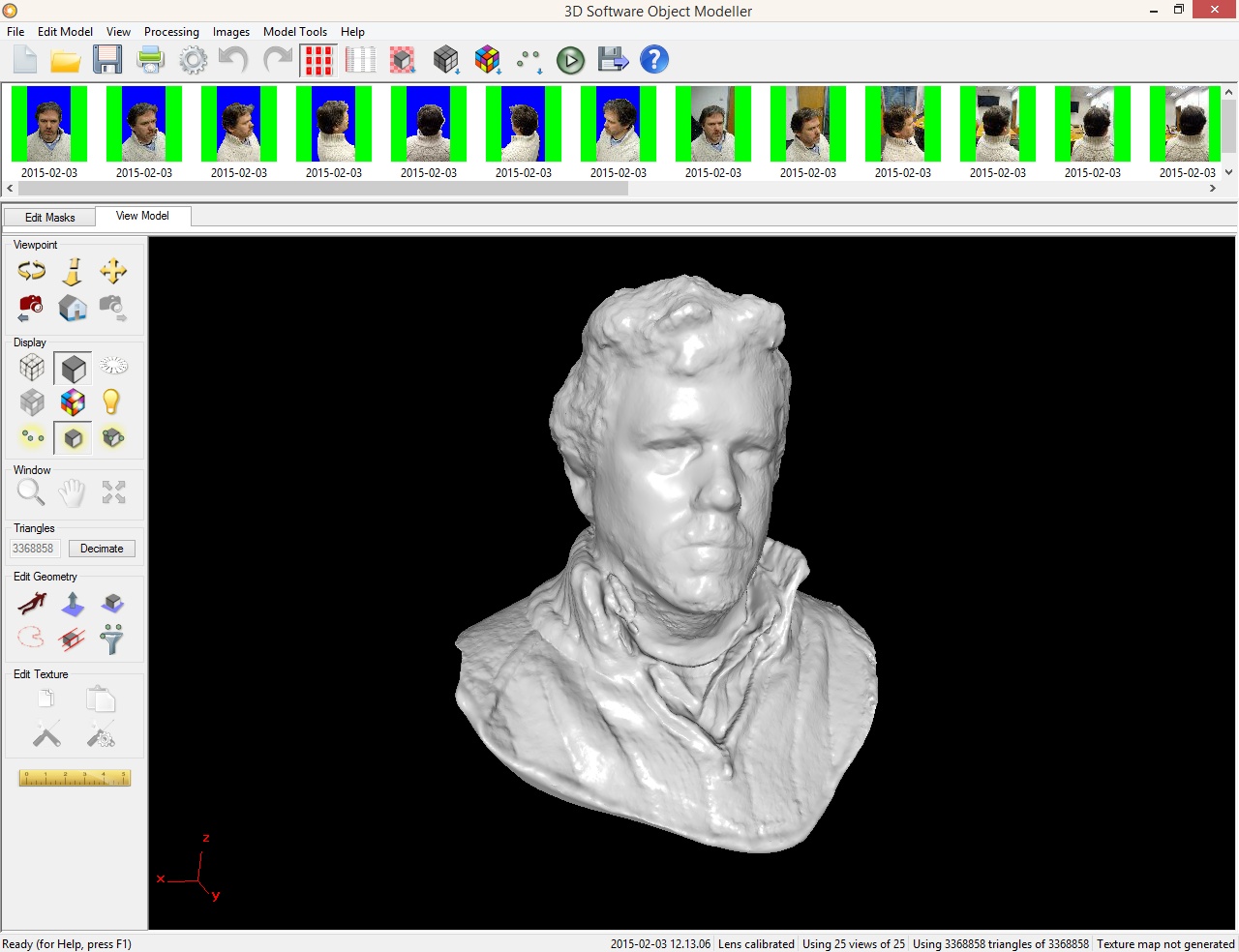
Obviously using calibration markers is always going to be more reliable because they are carefully designed to be easy to identify in each photo. However, for typical environments there are usually enough recognizable scene features for an automated system to recover the camera motion. This allows users to use a mobile device to scan objects “in the field” without the need for placing any markers around the object. Avoiding markers also allows you to frame closeup shots of the object – for example capturing a human head from mobile phone shots walking around a seated person. Here’s an unedited example from our prototype system…
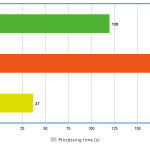
In this example, we took 25 shots with a mid-range Android phone (Acer E3) and after masking 7 of the shots, we ran a fully automatic process.