Version 5
We are pleased to announce the new version 5 release of our flagship software 3DSOM Pro for capturing 3D models from photos. The key new functionality in this release is our “Marker-less” camera tracking solution. This new workflow allows users to scan 3D objects “in the field” without requiring the use of printed calibration markers. So you can just walk around your object snapping photos with a mobile phone or DSLR camera and then process these in 3DSOM Pro to create a 3D model.
The list of new features in the new release include:
- Markerless camera solving – 3DSOM works out all the camera angles automatically using “natural” features in the scene.
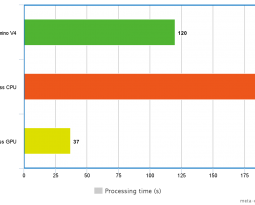
- Hardware accelerated (GPU) marker-less processing – if you have a NVIDIA graphics card, the marker-less processing is now hardware accelerated for fast processing (otherwise it will still run using multi-threaded CPU)
- More complete and reliable point cloud generation – we now extract as much information from the photos as possible
- Faster loading of images – using multi-threaded loading of JPEG images
- Bug fixes and incremental improvements to 3D modeling engine

The markerless workflow requires you to have good overlap between successive shots. We still support our calibration markers to allow reliable camera tracking in a studio environment.
3DSOM Pro v5 includes several example projects and photos showing the different workflows described in the User Guide.
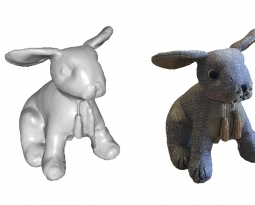
An example – capturing the “bunny” using a mobile phone
As an example of the new workflow, we placed a toy rabbit on a coffee table and snapped 30 shots using the iPhone camera app using the recommended approach of capturing pairs of shots around the object. The images were uploaded to a PC and opened in 3DSOM Pro v5.
After about 1 minute of processing the cameras and a set of 3D points on the object is produced automatically.

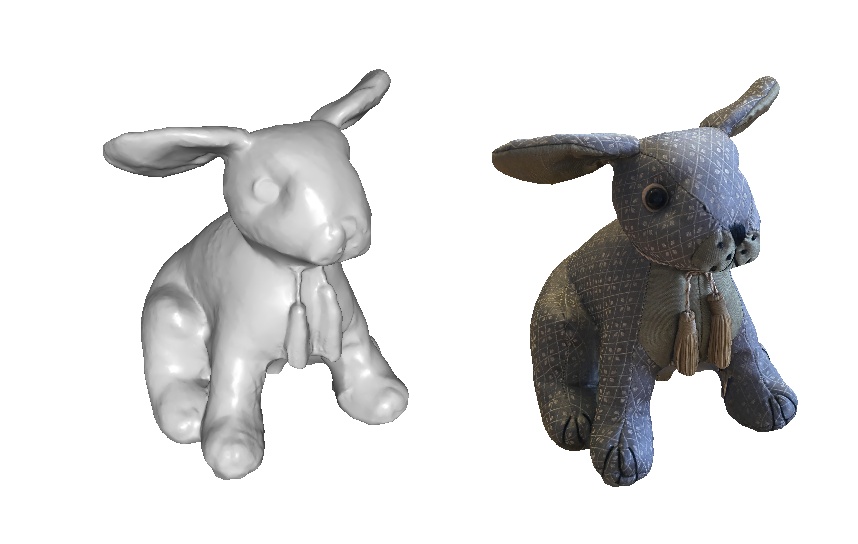
After masking 4 or 5 shots using the 3DSOM “Masking Wizard” a textured 3D model is automatically generated:
You can try 3DSOM Pro v5 even if you already have run a trial with version 4.
To find out more please visit our buy now page.